The MED 2022 conference will feature a full-day workshop on Active Vision Methods in Autonomous Navigation on Tuesday, June 28, 2022. (Here is the detailed description and schedule.) The Workshop covers several challenging areas including Autonomous navigation; Perception-Action coupling; Driverless cars; UAVs; SWAP-Aware design; Semantic mapping and navigation; SLAM; Loop-closure detection; Visual odometry.
How to register for the workshop?
There are two options:
Option 1) Workshop + conference registration
See registration.
Option 2) Workshop-only registration
To register for the workshop only (meaning you are attending the workshop, but not the main conference), use the appropriate option in the Step 3 of the usual registration process through PaperCept. (The registration process is organized in four Registration Steps: 1. Create/Update Profile — 2. Select Membership — 3. Select Events — 4. Confirm Payment.)
Go to http://controls.papercept.net/registration/, select conference “MED 2022”, enter your PIN and Password and click on Login.

In the first registration step, you can check (and modify) your personal profile and continue with the registration (click on Register now).

In the second step, you can select your status (regular/student) and type of participation (in-person/virtual), and in the third step (snapshot below), you select the “Workshops only” option for registration.
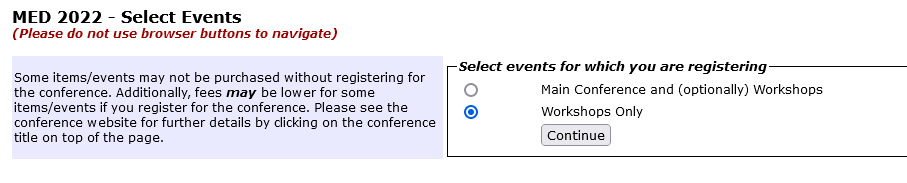
In the third step, you can select the desired workshop.

(The remaining steps are self-explanatory).


